
摘要
汽車(chē)行業(yè)的快速發(fā)展給人們帶來(lái)了極大的便利。 然而,一些問(wèn)題,如燃料消耗、污染物排放和交通擁堵已經(jīng)變得越來(lái)越嚴(yán)重。 特別是在城市高速公路上,如何解決這些問(wèn)題引起了研究人員的注意。因此,本文以“碳峰碳中和”為理念,基于V2X (vehicle-to-everything)通信系統(tǒng),設(shè)計(jì)了一套先進(jìn)的智能網(wǎng)聯(lián)汽車(chē)生態(tài)駕駛輔助系統(tǒng)。首先,智能路側(cè)設(shè)備在城市高速公路上收集交通和車(chē)輛信息。其次,邊緣計(jì)算服務(wù)器融合數(shù)據(jù),形成動(dòng)態(tài)交通流的全息感知,并傳輸區(qū)域道路交通安全預(yù)警提示。同時(shí),考慮到融合后的數(shù)據(jù),提出了一個(gè)最小能耗的車(chē)輛速度引導(dǎo)模型。第三,在V2X通信中設(shè)計(jì)了一個(gè)應(yīng)用程序,以顯示安全警告提示、交通和車(chē)輛的狀態(tài),以及最佳速度指導(dǎo)。最后,現(xiàn)場(chǎng)測(cè)試的實(shí)驗(yàn)結(jié)果表明,采用先進(jìn)的生態(tài)駕駛輔助系統(tǒng)的車(chē)輛的能源消耗明顯減少。此外,駕駛員可以獲得當(dāng)前的交通狀況和安全警告提示,從而提高了駕駛安全性。
關(guān)鍵詞
碳峰值和碳中和,先進(jìn)的生態(tài)駕駛輔助系統(tǒng),智能互聯(lián)車(chē)輛,V2X通信系統(tǒng),最佳速度引導(dǎo)。
如今,安全和碳排放是現(xiàn)代交通系統(tǒng)的主要挑戰(zhàn)。駕駛員需要大量的道路信息來(lái)防止交通事故。同時(shí),隨著城市高速公路的增加,交通碳排放的比例也逐漸增加。因此,如何減少交通碳排放成為一個(gè)重要的研究課題。
世界各地的研究人員對(duì)先進(jìn)的生態(tài)駕駛輔助系統(tǒng)進(jìn)行了不同的研究。趙曉華等根據(jù)北京出租車(chē)的實(shí)際運(yùn)營(yíng)數(shù)據(jù),分析了城市快速路不同道路交通條件下駕駛行為與車(chē)輛油耗之間的關(guān)系,認(rèn)為綜合節(jié)能潛力可達(dá)到11. 18% [1]. 王振波等人分析了車(chē)身輕量化設(shè)計(jì)對(duì)電動(dòng)汽車(chē)能耗的影響,認(rèn)為能耗與整車(chē)質(zhì)量基本呈線性關(guān)系。因此,盡量減少車(chē)輛的質(zhì)量有利于降低能源消耗[2]。宋媛媛提出了不同駕駛條件下電動(dòng)汽車(chē)能耗的定量模型,重點(diǎn)研究了車(chē)輛駕駛參數(shù)的影響,建立了不同形式的微觀能耗模型[3]。
李曉鵬等人利用分段二次函數(shù)構(gòu)建車(chē)輛時(shí)空軌跡,簡(jiǎn)化了高速公路環(huán)保駕駛的優(yōu)化控制問(wèn)題,并將優(yōu)化變量從有限時(shí)間內(nèi)的多個(gè)連續(xù)速度值轉(zhuǎn)換為多個(gè)函數(shù)曲線系數(shù),大大減少了優(yōu)化變量的數(shù)量,提高了求解效率[4]。 考慮到車(chē)輛軌跡、瞬時(shí)速度曲線和路面坡度對(duì)能源消耗的影響,Anastasiadou等人提出了一個(gè)基于車(chē)輛特定功率的電動(dòng)汽車(chē)能源消耗模型[5]。由于溫度、風(fēng)速、電池SOC、輔助負(fù)載、道路海拔、車(chē)速和加速度等影響,莫迪等人使用卷積神經(jīng)網(wǎng)絡(luò)(CNN)來(lái)建立能耗預(yù)測(cè)模型[6]。
綜上所述,關(guān)于生態(tài)駕駛策略和能耗測(cè)量方法的研究很多,但有些研究只考慮了車(chē)輛狀態(tài)信息或道路狀況對(duì)能耗的影響,沒(méi)有與交通環(huán)境信息相結(jié)合,應(yīng)用有限。此外,道路和車(chē)輛狀態(tài)信息不能被全面提取,一些全局最優(yōu)方法有大量的計(jì)算量,這導(dǎo)致預(yù)測(cè)的準(zhǔn)確性和結(jié)果的可信度下降。隨著智能互聯(lián)汽車(chē)和5G通信技術(shù)的發(fā)展,基于車(chē)對(duì)車(chē)(V2V)和車(chē)對(duì)基礎(chǔ)設(shè)施(V2I)的智能交通系統(tǒng)為智能綠色出行提供了新的機(jī)遇[7]。
因此,我們提出了一個(gè)先進(jìn)的生態(tài)駕駛輔助系統(tǒng),用于智能互聯(lián)車(chē)輛,該系統(tǒng)由V2X通信系統(tǒng)支持。通過(guò)對(duì)動(dòng)態(tài)交通的立體感知,一方面可以將周?chē)慕煌ㄐ畔⒎答伣o駕駛員進(jìn)行輔助駕駛,另一方面可以應(yīng)用于車(chē)速引導(dǎo)模型,獲得最佳車(chē)速,從而實(shí)現(xiàn)該地區(qū)群體的生態(tài)駕駛。
本文的其余部分組織如下。在下一節(jié)中,我們介紹了先進(jìn)的生態(tài)駕駛輔助系統(tǒng)和智能互聯(lián)車(chē)輛架構(gòu),并提出了一個(gè)基于車(chē)輛和交通的融合數(shù)據(jù)計(jì)算出能耗最低的速度的最佳速度指導(dǎo)模型。最后,先進(jìn)的生態(tài)駕駛輔助系統(tǒng)在一個(gè)真實(shí)場(chǎng)景中進(jìn)行了測(cè)試。通過(guò)最后的結(jié)果,總結(jié)了結(jié)論并提出了未來(lái)的研究方向。
A. 高級(jí)生態(tài)駕駛輔助系統(tǒng)的架構(gòu)
先進(jìn)的生態(tài)駕駛輔助系統(tǒng)由基于V2X通信系統(tǒng)的智能路側(cè)設(shè)備和智能互聯(lián)車(chē)輛的車(chē)載應(yīng)用組成。智能路邊設(shè)備包括多源傳感器,如高清攝像頭、激光雷達(dá)和碳檢測(cè)器。而車(chē)載應(yīng)用程序用于顯示當(dāng)前交通狀況、車(chē)輛狀態(tài)、安全警告提示和最佳速度指導(dǎo)等信息。
智能路側(cè)平臺(tái)融合上述傳感器的數(shù)據(jù),并傳輸?shù)竭吘売?jì)算服務(wù)器,再結(jié)合邊緣計(jì)算服務(wù)器中的交通事件數(shù)據(jù)和V2X數(shù)據(jù)(包括車(chē)速、加速度等信息),從而對(duì)歷史和未來(lái)交通流量數(shù)據(jù)、空間關(guān)系軌跡、預(yù)測(cè)交通流量數(shù)據(jù)、當(dāng)前交通狀態(tài)和車(chē)載傳感器信息等信息進(jìn)行處理,進(jìn)行安全預(yù)警提示。同時(shí),車(chē)載系統(tǒng)結(jié)合路邊平臺(tái)反饋的當(dāng)前車(chē)速、路況、碳排放等信息,計(jì)算出最佳車(chē)速,以最大限度地減少能源消耗。
最后,先進(jìn)的生態(tài)駕駛輔助系統(tǒng)實(shí)現(xiàn)了緊急預(yù)警、碰撞預(yù)警、道路狀態(tài)提示和最佳速度引導(dǎo)等功能。高級(jí)生態(tài)駕駛輔助系統(tǒng)的技術(shù)結(jié)構(gòu)如圖1所示。

B. 智能互聯(lián)汽車(chē)的V2X通信系統(tǒng)
在駕駛過(guò)程中,由于盲點(diǎn)或視線被遮擋,司機(jī)可能無(wú)法及時(shí)、正確地評(píng)估當(dāng)前的駕駛和交通狀況。那么,在緊急情況下,司機(jī)可能會(huì)急劇加速或減速,這很危險(xiǎn),并將大大增加車(chē)輛的能耗。因此,我們?cè)O(shè)計(jì)了一個(gè)基于V2X通信系統(tǒng)的智能互聯(lián)汽車(chē)架構(gòu)[8],它將智能路邊多源傳感器與車(chē)載傳感器相結(jié)合,收集交通狀況數(shù)據(jù),使司機(jī)能夠與當(dāng)前的道路交通狀況進(jìn)行互動(dòng)。智能互聯(lián)汽車(chē)的架構(gòu)設(shè)計(jì)如圖2所示[9]。
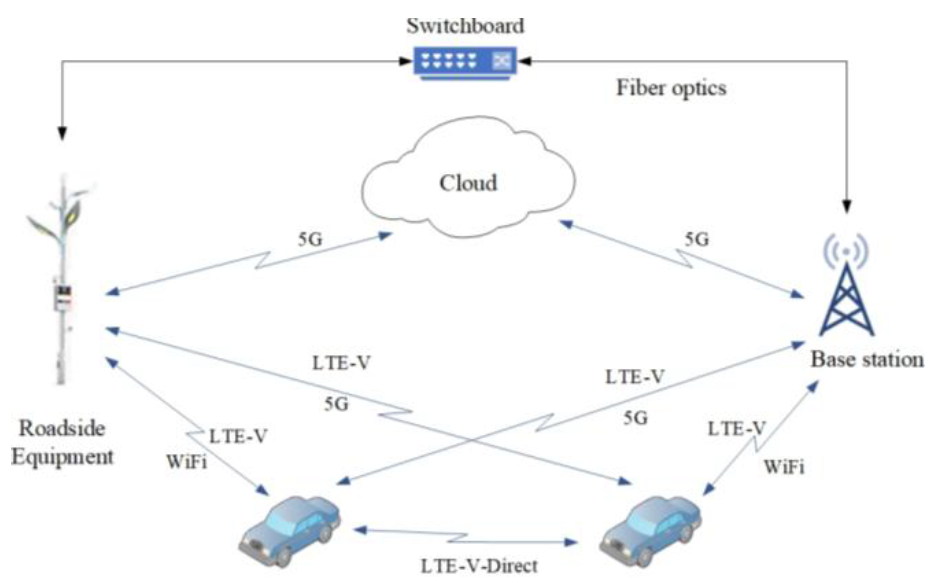
其中,車(chē)輛之間的低延遲和高可靠性的通信可以通過(guò)LTE-V-Direct技術(shù)實(shí)現(xiàn)。此外,在5G蜂窩網(wǎng)絡(luò)的協(xié)助下,交通數(shù)據(jù)被快速上傳和下載,然后實(shí)現(xiàn)車(chē)輛和路邊設(shè)備之間的寬頻帶和覆蓋通信。路邊設(shè)備通過(guò)多源傳感器感知周?chē)?chē)輛信息,并接收車(chē)輛狀態(tài)數(shù)據(jù),包括位置、速度、加速度、航向角、高度等。
車(chē)輛通過(guò)V2X通信系統(tǒng)獲得的路況信息和交通流信息,協(xié)助司機(jī)評(píng)估當(dāng)前的交通狀況。此外,這些信息被用于最小能耗的速度指導(dǎo)模型中,以計(jì)算出最佳速度。
C. 最佳速度引導(dǎo)模型
根據(jù)碳峰值和碳中和的概念,我們?yōu)橄冗M(jìn)的生態(tài)駕駛輔助系統(tǒng)開(kāi)發(fā)了一個(gè)最佳速度引導(dǎo)模型[10]。基于動(dòng)態(tài)交通全息感知和車(chē)輛運(yùn)行狀態(tài)信息,本文提出了智能互聯(lián)車(chē)輛的最優(yōu)速度引導(dǎo)模型。該模型通過(guò)對(duì)車(chē)輛和交通數(shù)據(jù)的分析和計(jì)算,規(guī)劃出能耗最低的速度,然后傳輸給縱向速度控制器,進(jìn)行加速或制動(dòng),以達(dá)到經(jīng)濟(jì)和環(huán)保的目的,如圖3所示。
1) 電動(dòng)汽車(chē)能源消耗的預(yù)測(cè)方法: 當(dāng)電動(dòng)汽車(chē)減速和制動(dòng)時(shí),其傳動(dòng)系統(tǒng)可以將部分動(dòng)能回收到電池。因此,在構(gòu)建車(chē)輛能耗模型時(shí),我們不僅要考慮電池提供給電機(jī)和車(chē)載設(shè)備的電能,還要考慮制動(dòng)所回收的能量[11]。

我們研究的是車(chē)速對(duì)能耗的影響,所以只考慮縱向的車(chē)輛動(dòng)力學(xué)模型[12],如公式(1)所示:

其中 Ft 表示驅(qū)動(dòng)力, M 表示質(zhì)量, v 表示速度,d表示旋轉(zhuǎn)質(zhì)量的修正系數(shù),f 表示滾動(dòng)阻力系數(shù), q為道路坡度, CD 表示空氣動(dòng)力阻力系數(shù), A 表示迎風(fēng)面積,r 為空氣密度, v(t) 表示車(chē)速,Pwheels 表示電動(dòng)汽車(chē)車(chē)輪的功率。電能回收主要受系統(tǒng)結(jié)構(gòu)、行駛路況和駕駛習(xí)慣的影響[13],制動(dòng)能量回收如公式(2)所示:

其中 hr 表示電力回收效率,vi t +D和vi 表示前一時(shí)刻和當(dāng)前制動(dòng)時(shí)刻的速度。電動(dòng)汽車(chē)的車(chē)載電子設(shè)備能耗計(jì)算方法見(jiàn)在公式(3)中:
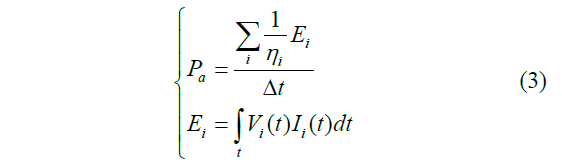
其中 Ei 分別表示每個(gè)機(jī)載附件所消耗的能量,ni 表示其相應(yīng)的效率。
2) 具有最低能耗的速度引導(dǎo)模式: 總之,當(dāng)電動(dòng)汽車(chē)加速或以恒定速度行駛時(shí),電機(jī)作為耗電元件,消耗電池的電能,將其轉(zhuǎn)化為驅(qū)動(dòng)扭矩。在這個(gè)過(guò)程中,電池SOC(充電狀態(tài))的減少是由電機(jī)的功率消耗造成的。 當(dāng)車(chē)輛減速時(shí),電機(jī)作為一個(gè)發(fā)電機(jī),將制動(dòng)扭矩轉(zhuǎn)化為制動(dòng)能量,為電池供電,電池SOC上升。電池SOC可以反映出車(chē)輛的能量消耗。本文建立了一個(gè)能量消耗模型,通過(guò)確定車(chē)速和電池SOC之間的數(shù)學(xué)關(guān)系得到。
我們使用安培小時(shí)積分法來(lái)估計(jì)電池SOC[14],如公式(4)所示:
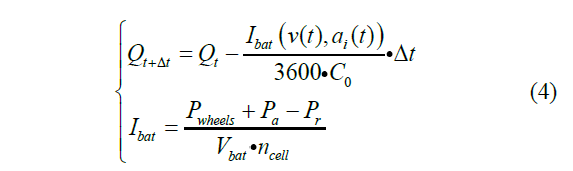
其中 Q t +Dt 表示電池單元在下一時(shí)刻的SOC;Qt 表示電池單元在當(dāng)前時(shí)刻的SOC;C0 表示電池單元的最大容量, ai (t) 表示加速度, Ibat 表示電池單元的電流,Vbat 表示電池單元的電壓。
實(shí)際功率不是一個(gè)固定值。它隨著電機(jī)的角速度和電機(jī)的實(shí)際扭矩而變化。
當(dāng)電動(dòng)汽車(chē)加速或勻速行駛時(shí),隨著電機(jī)的角速度和電機(jī)的實(shí)際扭矩的增加,電機(jī)的實(shí)際功率也在增加,這意味著電機(jī)的耗電能力變強(qiáng),電池SOC下降得更快。當(dāng)電動(dòng)車(chē)減速時(shí),隨著電機(jī)角速度和實(shí)際電機(jī)扭矩的絕對(duì)值增加,實(shí)際電機(jī)功率的絕對(duì)值也增加,這意味著電機(jī)的充電能力變強(qiáng),電池SOC上升得更快。在本文中,電機(jī)的實(shí)際功率是由電機(jī)的角速度和電機(jī)的實(shí)際扭矩得到的。電機(jī)的實(shí)際功率用公式(5)表示,其中 L 是電機(jī)實(shí)際功率的數(shù)值函數(shù),Tmot _ act (v) 表示電機(jī)實(shí)際扭矩, w mot 表示電機(jī)角速度。

3) V2X通信中速度引導(dǎo)的最佳解決方案: 在V2X場(chǎng)景下,當(dāng)前電動(dòng)汽車(chē)的車(chē)速和交通信息可以通過(guò)智能路側(cè)設(shè)備獲得,因此我們提出了一種基于智能互聯(lián)交通的車(chē)速即時(shí)優(yōu)化控制方法,如式(6)所示。
在電動(dòng)汽車(chē)的駕駛過(guò)程中,我們?cè)赩2X通信中計(jì)算出車(chē)輛的最佳瞬時(shí)速度。根據(jù)當(dāng)前的車(chē)速和不同的下一刻加速度,我們可以計(jì)算出不同的轉(zhuǎn)速以及電機(jī)的扭矩,并進(jìn)一步計(jì)算出不同的電池在下一刻的剩余電量。因此,我們可以找到與電池的最高剩余功率水平相對(duì)應(yīng)的速度和加速度。因此,通過(guò)使用即時(shí)最優(yōu)控制方法,可以實(shí)時(shí)調(diào)整速度和加速度,使車(chē)輛在行駛過(guò)程中的能量消耗降到最低。
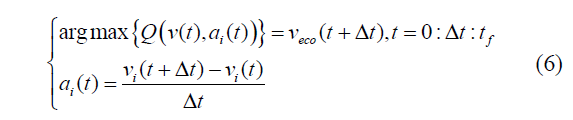
其中 veco (t +t) 表示下一時(shí)刻的經(jīng)濟(jì)車(chē)速, tf 表示駛出道路的時(shí)間, v(t) 表示當(dāng)前的車(chē)輛速度, vi (t +t) 表示所有可以為車(chē)輛的下一個(gè)時(shí)刻選擇的速度點(diǎn)。
將下一時(shí)刻的所有速度點(diǎn)帶入SOC公式,我們可以得到下一時(shí)刻所有速度點(diǎn)對(duì)應(yīng)的電池單元,然后我們可以找到使下一時(shí)刻電池單元的SOC最高的點(diǎn),此時(shí)能耗最低,速度是下一時(shí)刻車(chē)輛的最佳速度。
此外,我們?cè)O(shè)計(jì)了一個(gè)車(chē)載輔助駕駛系統(tǒng)的應(yīng)用,它是基于C#和.NET框架實(shí)現(xiàn)的,用于與用戶(hù)進(jìn)行視覺(jué)交互,如圖4所示。根據(jù)功能,分為七個(gè)模塊:最佳速度引導(dǎo)模塊、緊急預(yù)警或最佳速度引導(dǎo)、信號(hào)狀態(tài)、車(chē)輛狀態(tài)分析、路況指示、駕駛記錄、風(fēng)險(xiǎn)指示和碰撞預(yù)警。
在安全驗(yàn)證場(chǎng)景中,當(dāng)車(chē)輛行駛在十字路口路段時(shí),路邊的攝像頭和LiDAR檢測(cè)到周?chē)男腥撕蛙?chē)輛信息,并將其傳輸給邊緣計(jì)算服務(wù)器,服務(wù)器會(huì)將處理后的當(dāng)前路口交通狀態(tài)信息發(fā)送給車(chē)輛終端,并在應(yīng)用程序中顯示行人警告,以提醒駕駛員注意行人的位置。如果有潛在的車(chē)輛碰撞風(fēng)險(xiǎn),則會(huì)彈出代表其他車(chē)輛碰撞風(fēng)險(xiǎn)的 "紅色感嘆號(hào)",以確保車(chē)輛和行人安全。

圖4. 限速提醒和注意行人警告
III.真實(shí)場(chǎng)景下的實(shí)驗(yàn)
為了驗(yàn)證本文提出的最優(yōu)速度算法,我們?cè)诒本┦惺吧絽^(qū)阜石路進(jìn)行了V2X多源傳感器數(shù)據(jù)融合的真實(shí)場(chǎng)景測(cè)試,如圖5和圖6所示,綠色粗線描述了選定的路段。在實(shí)驗(yàn)中,我們定義了電動(dòng)車(chē)、電池和配方的參數(shù),如表一所示,其余的參數(shù)可以通過(guò)路邊設(shè)備獲得。此外,我們還通過(guò)先進(jìn)的生態(tài)駕駛輔助系統(tǒng)預(yù)測(cè)能源消耗。經(jīng)過(guò)驗(yàn)證,預(yù)測(cè)值與實(shí)際值的誤差如圖7所示。可以看出,相對(duì)誤差的絕對(duì)值不超過(guò)4%,平均誤差為2.996%,可以滿足實(shí)際場(chǎng)景要求,為速度預(yù)測(cè)模型提供數(shù)據(jù)支持。
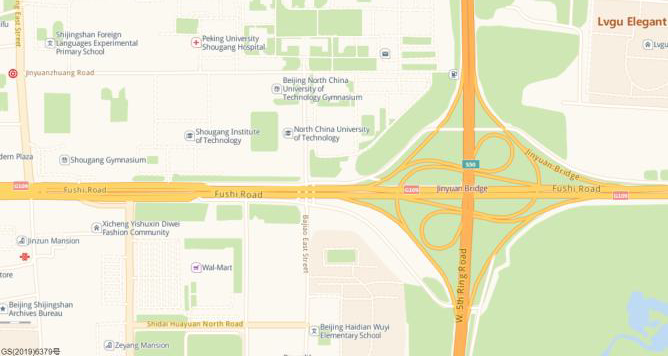
圖5. 真實(shí)場(chǎng)景下的測(cè)試路段

圖6. 實(shí)驗(yàn)測(cè)試場(chǎng)景
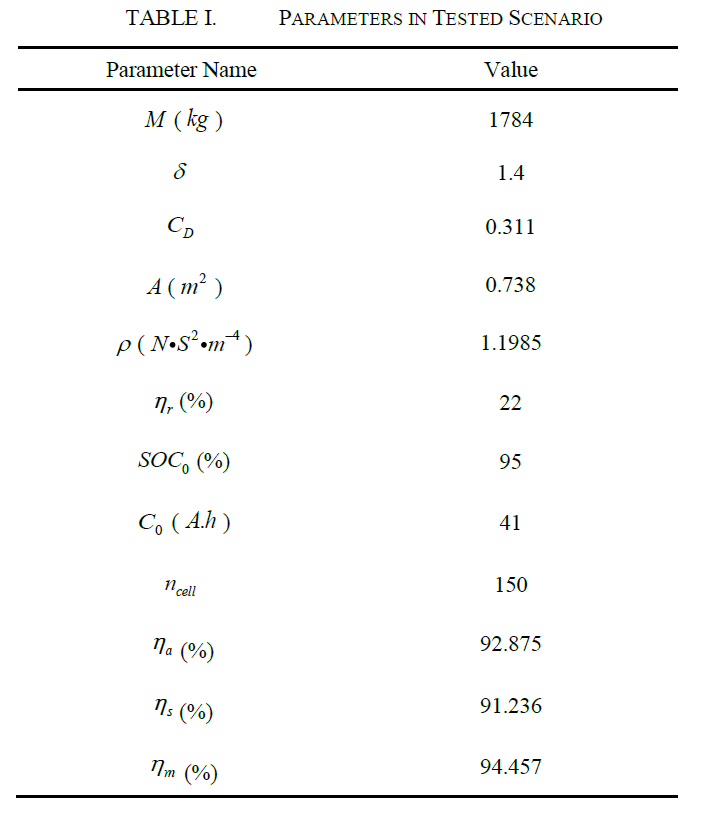
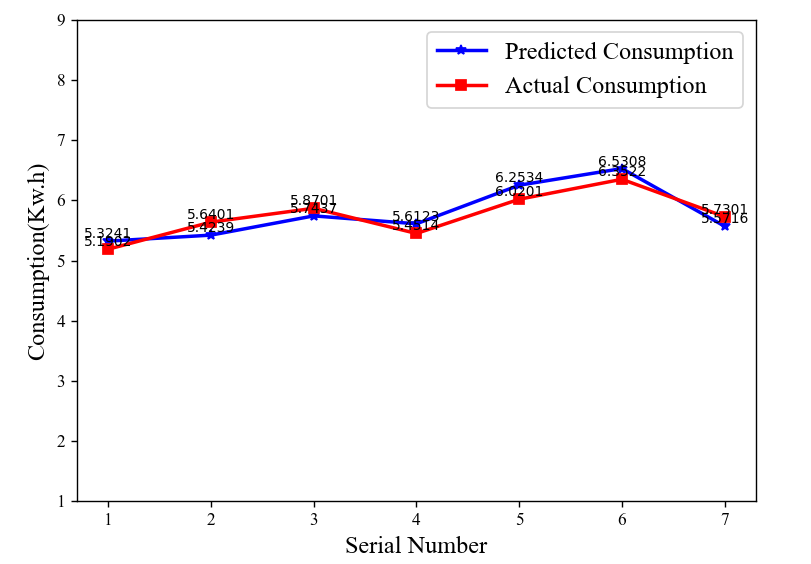
圖7. 能源消耗比較的預(yù)測(cè)誤差
在相同的道路條件下,我們分別收集了一天中9:00至10:00的輔助駕駛和一般駕駛的相應(yīng)能耗。經(jīng)過(guò)一周的觀察和統(tǒng)計(jì),結(jié)果如圖8所示,其中橙色線代表高級(jí)生態(tài)駕駛輔助策略下的能耗變化,藍(lán)色線代表一般駕駛條件下的能耗變化。從圖7可以看出,輔助駕駛在相同的道路條件下可以減少9.3%的能耗,并有效增加車(chē)輛的續(xù)航能力,達(dá)到了經(jīng)濟(jì)和環(huán)保的雙重目的。
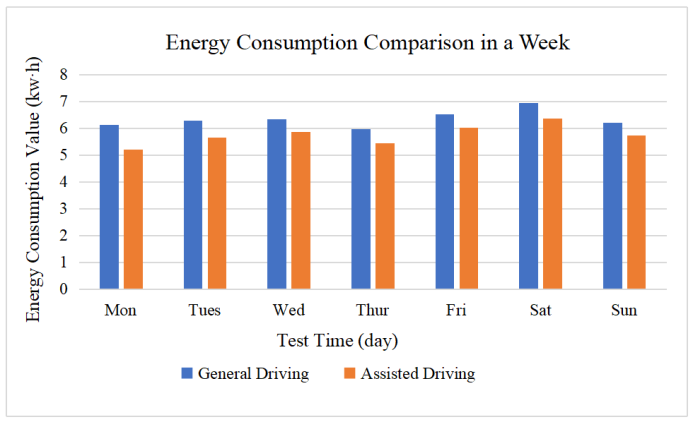
圖8. 一周內(nèi)的能源消耗比較
在低碳場(chǎng)景的驗(yàn)證中,當(dāng)車(chē)輛行駛在路況平穩(wěn)的城市高速公路上時(shí),路邊的傳感器會(huì)檢測(cè)路況信息和環(huán)境碳排放數(shù)據(jù),然后將它們傳輸?shù)竭吘売?jì)算服務(wù)器。根據(jù)最小能耗速度指導(dǎo)模型,邊緣計(jì)算服務(wù)器計(jì)算出最佳速度,并將其發(fā)送到車(chē)載終端,在生態(tài)駕駛系統(tǒng)應(yīng)用中顯示,如圖9所示。
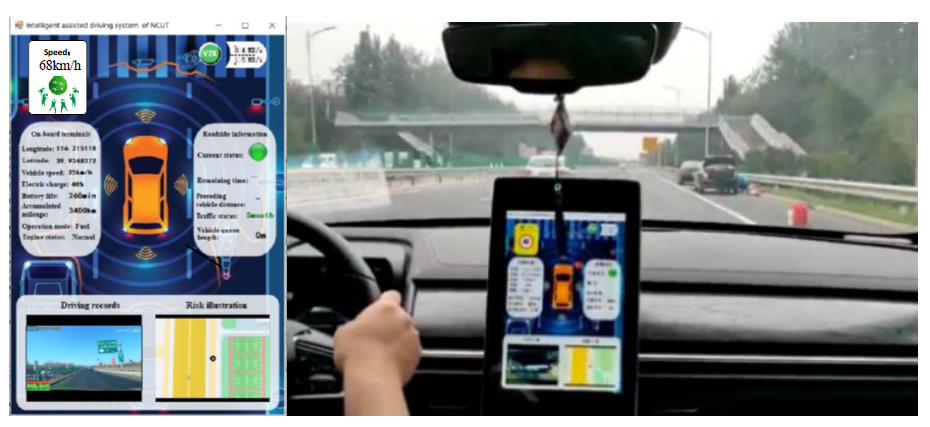
圖9. 最佳速度引導(dǎo)情景驗(yàn)證
IV.總結(jié)
為了實(shí)現(xiàn)可持續(xù)交通,我們選擇城市高速公路作為應(yīng)用場(chǎng)景。本文以低碳排放為理念,為智能互聯(lián)車(chē)輛設(shè)計(jì)了一個(gè)先進(jìn)的生態(tài)駕駛輔助系統(tǒng)。 首先,我們介紹了先進(jìn)的生態(tài)駕駛輔助系統(tǒng)的架構(gòu)和用于智能互聯(lián)車(chē)輛的V2X通信系統(tǒng),通過(guò)數(shù)據(jù)融合對(duì)車(chē)輛周?chē)慕煌ㄎ矬w進(jìn)行分類(lèi)和識(shí)別。其次,邊緣計(jì)算服務(wù)器獲得道路和車(chē)輛狀態(tài)信息,并計(jì)算出最佳速度,然后將這些數(shù)據(jù)發(fā)送給高級(jí)生態(tài)駕駛輔助系統(tǒng)。最后,該應(yīng)用顯示車(chē)輛狀態(tài)信息、安全警告提示和最佳速度指導(dǎo),以幫助司機(jī)安全和低碳駕駛。通過(guò)在真實(shí)場(chǎng)景中的測(cè)試,實(shí)驗(yàn)結(jié)果表明,能耗比較的預(yù)測(cè)誤差不超過(guò)4%,平均誤差為2.996%。此外,配備先進(jìn)的生態(tài)駕駛輔助系統(tǒng)的電動(dòng)汽車(chē)在同等路況下可降低9.3%的能耗,能夠滿足實(shí)際智能互聯(lián)交通場(chǎng)景下的安全低碳駕駛要求,推動(dòng)未來(lái) "碳峰碳中 "時(shí)代綠色安全出行方式的不斷創(chuàng)新和發(fā)展。
轉(zhuǎn)自智能汽車(chē)開(kāi)發(fā)者平臺(tái)
